Nel primo post della serie [qui], ho descritto come assemblare i vari componenti che formano il kit del robot car.
A questo punto il robot car ha la necessita' di essere controllato per potersi muovere.
In questo post descrivo i passi necessari per installare il cervello (un nodeMCU) ed il driver dei 2 motori CC collegati alle ruote.
Componenti Necessari
Per portare a termine i passi descritti in questo post sono necessari i seguenti componenti
nodeMCU

Il nodeMCU e' un ottima scelta in quanto associa al micro controllore anche il dispositivo WiFi che mi permette di controllare da remoto il RobotCar.
(Mini) BreadBoard da 170 fori

Per comodità' ho usato una mini breadboard con 170 punti di connessione.
E' possibile usare una più' comune breadboard da 400 punti senza particolari problemi
Sulla mini breadboard montero' il nodeMCU e realizzero' le poche connessioni necessarie per realizzare questo progetto.
Scheda driver motori L298N

Nel Kit e' inclusa la scheda di controllo dei motori in corrente continua. E' basata sull'integrato L298.
In questo post (L298N Driver Motori con Arduino) descrivo in dettaglio come si utilizza la scheda di controllo.
Filo e Cavetti di connessione

Gomma adesiva
Per fissare i vari componenti sul telaio del RobotCar, uso una gomma adesiva come questa

Passiamo ora all'assemblaggio dei componenti sul telaio del RobotCar.
Passo #1: Saldatura alimentazione motori

I motori sono dotati di due terminali metallici su cui bisogna saldare un filo di alimentazione.
Inserisco un filo e ne ripiego leggermente l'estremità, quasi a formare un piccolo uncino.
Questo rende il collegamento più' solido e duraturo.
Questo rende il collegamento più' solido e duraturo.
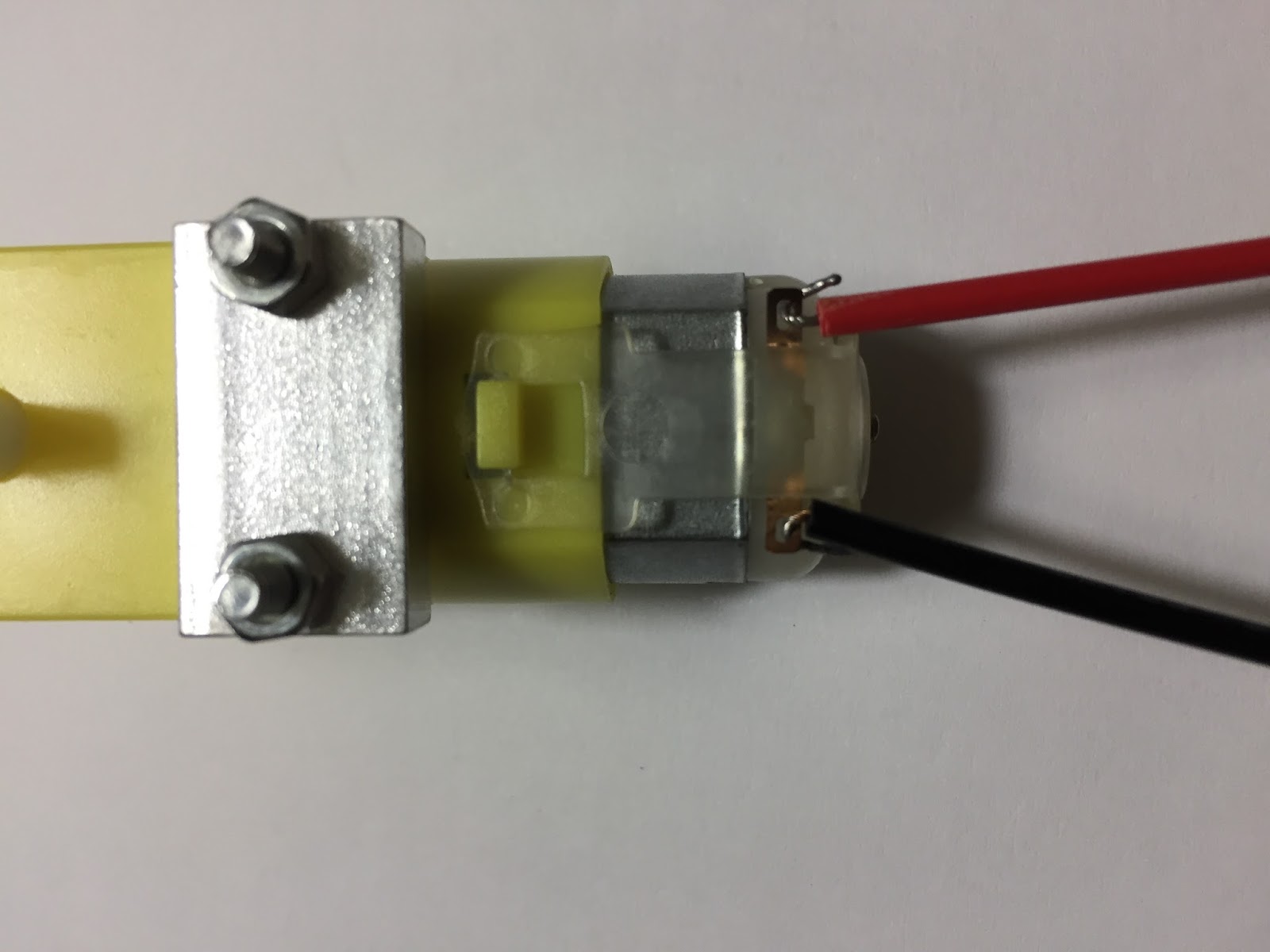

Ora con il saldatore ben caldo, applicoun po' di stagno in modo da saldare i fili di alimentazione al connettore metallico del motore.


Questo e' il risultato ottenuto.

Passo #2: Fissaggio mini-breadboard al telaio
Applico un po' di gomma adesiva al fondo della mini-breadboard

Ora con una lieve pressione, faccio aderire la mini-breadboard al telaio del RobotCar.
Se la vostra breadboard e' dotata di adesivo sul fondo potete evitare l'uso della gomma adesiva

Passo #3: Passaggio fili alimentazione motore
Faccio passare i fili di alimentazione dei motori nelle fessure presenti nel telaio del RobotCar come indicato in figura

Faccio passare i fili con delicatezza per evitare di staccarli dai motori.

Questo e' il risultato ottenuto.

Faccio passare i fili di alimentazione dei motori nelle fessure presenti nel telaio del RobotCar come indicato in figura

Faccio passare i fili con delicatezza per evitare di staccarli dai motori.

Questo e' il risultato ottenuto.

Passo #4: Montaggio nodeMCU su mini-breadboard
In questo passo, inserisco il nodeMCU sulla mini-breadboard in modo simmetrico, lasciando una fila libera per parte.

La inserisco tutta da un lato, in modo da lasciare due colonne libere sulla sinistra

In questo passo, inserisco il nodeMCU sulla mini-breadboard in modo simmetrico, lasciando una fila libera per parte.

La inserisco tutta da un lato, in modo da lasciare due colonne libere sulla sinistra

Passo #5: Posizionamento scheda L298N
Infine posiziono, sul telaio del RobotCar, la scheda L298N, per il controllo dei motori.
Anche in questo caso mi aiuto con la gomma adesiva.


Infine posiziono, sul telaio del RobotCar, la scheda L298N, per il controllo dei motori.
Anche in questo caso mi aiuto con la gomma adesiva.


Passo #6: Schema bread-board
Nelle due figure sotto, lo schema breadboard da realizzare.


Nelle due figure sotto, lo schema breadboard da realizzare.


Passo #7: Cablaggio circuito
Adesso, che tutti i componenti sono correttamente posizionati sul RobotCar, inizio a creare il circuito sulla mini-breadboard usando dei cavetti DuPont (rainbow wire)
Inizio connettendo il filo rosso (positivo) e quello nero (negativo), dal porta batterie alla bread-board come indicato in figura.

Adesso collego due piccoli spezzoni di filo, dalla scheda L298N alla breadboard come in figura.

Il filo blue va connesso al positivo della batteria, mentre il filo bianco al negativo.

Adesso collego i fili di alimentazione dei due motori alla scheda L298N come in figura.
L'ordine rosso-nero non e' cosi' importante, in quanto e' facilissimo modificare lo sketch in modo da far ruotare i motori nel verso corretto.

Ora collego l'alimentazione alla scheda nodeMCU.
Come si vede in figura collego il polo negativo della batteria a GND sul nodeMCU.
Allo stesso modo, collego il polo positivo al pin Vin del nodeMCU.

Infine, collego i cavetti di controllo dei motori dal nodeMCU alla scheda L298N.
I collegamenti sono i seguenti:
Lato scheda L298N:
- filo marrone: pin IN1
- filo giallo: pin IN2
- filo verde: pin IN3
- filo grigio: pin IN4

Lato scheda nodeMCU:
- filo marrone: pin D0
- filo giallo: pin D1
- filo verde: pin D3
- filo grigio: pin D4

Ed ecco il RobotCar completamente assemblato e con il circuito cablato in maniera corretta

Adesso, che tutti i componenti sono correttamente posizionati sul RobotCar, inizio a creare il circuito sulla mini-breadboard usando dei cavetti DuPont (rainbow wire)
Inizio connettendo il filo rosso (positivo) e quello nero (negativo), dal porta batterie alla bread-board come indicato in figura.

Adesso collego due piccoli spezzoni di filo, dalla scheda L298N alla breadboard come in figura.

Il filo blue va connesso al positivo della batteria, mentre il filo bianco al negativo.

Adesso collego i fili di alimentazione dei due motori alla scheda L298N come in figura.
L'ordine rosso-nero non e' cosi' importante, in quanto e' facilissimo modificare lo sketch in modo da far ruotare i motori nel verso corretto.

Ora collego l'alimentazione alla scheda nodeMCU.
Come si vede in figura collego il polo negativo della batteria a GND sul nodeMCU.
Allo stesso modo, collego il polo positivo al pin Vin del nodeMCU.

Infine, collego i cavetti di controllo dei motori dal nodeMCU alla scheda L298N.
I collegamenti sono i seguenti:
Lato scheda L298N:
- filo marrone: pin IN1
- filo giallo: pin IN2
- filo verde: pin IN3
- filo grigio: pin IN4

Lato scheda nodeMCU:
- filo marrone: pin D0
- filo giallo: pin D1
- filo verde: pin D3
- filo grigio: pin D4

Ed ecco il RobotCar completamente assemblato e con il circuito cablato in maniera corretta

Passi Successivi
Ora che il RobotCar e' completament5e assemblato e cablato posso concentrarmi sulla parte software.
Devo sviluppare due componenti:
- applicazione per dispositivo mobile: uso l'ottimo AppInventor in quanto il progetto e' orientato a chi non sa' ancora programmare
- sketch per nodeMCU che implementa un web server che controlla il movimento del RobotCar
Tratterò' l'argomento software in un post separato
Ora che il RobotCar e' completament5e assemblato e cablato posso concentrarmi sulla parte software.
Devo sviluppare due componenti:
- applicazione per dispositivo mobile: uso l'ottimo AppInventor in quanto il progetto e' orientato a chi non sa' ancora programmare
- sketch per nodeMCU che implementa un web server che controlla il movimento del RobotCar
Tratterò' l'argomento software in un post separato
Nessun commento:
Posta un commento