Questo e' il terzo e' ultimo post di una serie che descrive la realizzazione del progetto RobotCar con nodeMCU controllato da applicazione Android.
I post precedenti sono: RobotCar - Assemblaggio e RobotCar con nodeMCU
I questo post conclusivo descrivo e condivido il software per l'applicazione Andoird realizzato con AppInventor e lo scketch per il nodeMCU per il controllo del RobotCar.
RobotCar Android Controller
Siccome questo progetto e' rivolto per dei giovanissimi ho realizzato l'applicazione per Android con l'ottimo MIT App Inventor.
L'app Android e' molto semplice e' puo' essere estesa a piacere.
Ha la funzione principale di spiegare come controllare un dispositivo remoto con delle semplici chiamate HTTP GET.
Per i piu' esperti, dico subito che il meccanismo di comunicazione e' molto antiquato ed utilizza dei parametri nella URL come si faceva a meta' anni 90.
Tuttavia, siccome e' orinetato a dei giovanissimi, ho scelto questa modalita' per renderla comprensibile.
Per chi realizza il progetto suggerisco di implementare un server REST. Tuttavia' sono solo dettagli.
Interfaccia Grafica

Come anticipato l'interfaccia grafica e' semplicissima. E' composta da 4 pulsanti che rappresentano le 4 direzioni di movimento del RobotCar.
Gli oggetti utilizzati sono i seguenti

Ho utilizzato un layout a tabella (5 righe e 5 colonne). Ho anche usato due label (senza testo) per ottenere uno spaziamento corretto dei pulsanti.
Per chi vuole usare l'app direttamente senza realizzarla in AppInventor ho messo il file APK sul mio GitHub [RobotCar - Progetto Completo]
Blocchi AppInventor

Il "codice" e' molto semplice come l'interfaccia.
Questa app presuppone che il RobotCar sia in ascolto all'indirizzo 192.168.10.10. Ovviamente potete cambiarlo con un indirizzo IP di vostro gradimento (il RobotCar crea un rete WiFI chiamata RoboCar-01).
Il codice fa si' che ad ogni pressione di un pulsante di controllo, una HTTP GET venga inviata al RobotCar con un parametro chiamato comado che puo' assumere un valore corrispondente alla direzione di movimento desiderata:
- AVANTI
- INDIETRO
- DESTRA
- SINISTRA
- FERMO
Da notare che il comando FERMO, che fa immediatamente fermare il RobotCar, viene inviato quando il pulsante viene rilasciato.
Quindi il RobotCar si muove, nella direzione prescelta, finché' il pulsante rimane premuto.
RobotCar WebServer per nodeMCU
Il RobotCar e' controllato da un nodeMCU fissato sul suo telatio.
Ho implementato un semplice WebServer sul nodeMCU in modo da poter ricevere i comandi provenienti dall'app Android e da attuare il controllo sui motori.
Ho implementato un semplice WebServer sul nodeMCU in modo da poter ricevere i comandi provenienti dall'app Android e da attuare il controllo sui motori.
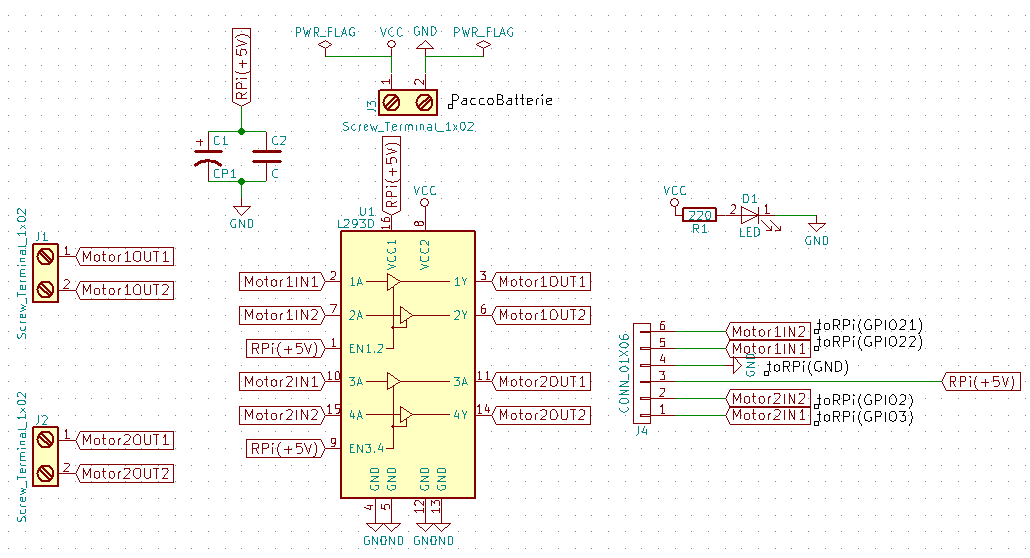
I GPIO del nodeMCU da utilizzare sono definiti nelle linee 5 - 9.
Il codice imposta il nodeMCU in modalita' AccessPoint e crea una rete WiFi chiamata RobotCar-01
Nella linea 43 configuro il webserver per eseguire la funzione muovi_robocar al ricevimento di un HTTP GET all'url: http://192.168.10.10/robocar
La funzione muovi_robocar e' molto semplice e in funzione del parametro comando, letto dalla query HTTP, richiama al funzione di movimento del RobotCar relativa.
Ogni funzione di movimento del RobotCar, aziona i motori destro e sinistro in modo appropriato.
Test del RobotCar
Concludo questo progetto con il test del RobotCar