Questa e' la seconda parte del secondo post di una serie di 3 relativa all'assemblaggio e testing dell'oscilloscopio amatoriale in kit DSO138.
I precedenti articoli sono disponibili qui:
In questo post continuo con l'assemblaggio del kit
Passo #13: Micro Pulsanti
In questo passo monto i 5 micro-pulsanti. Entrano nel PCB solo se orientati in modo corretto, perciò non si può commettere nessun errore.
Ecco l'aspetto del PCB alla fine del passo #13.

Passo #14: Connettore Alimentazione (pin header)
Il connettore J9 pu' entrare nel PCB in entrambi i versi.
Tuttavia il modo corretto di montarlo e con la scanalatura verso l'esterno del PCB, come mostrato in figura.
Faccio quindi attenzione a saldarlo nel verso giusto.

Ecco l'aspetto del PCB alla fine del passo #14.


Passo #15: Connettore a Barilotto
Anche il connettore a "barilotto" entra in un solo verso quindi non si può montare in modo sbagliato.

Passo #16: Pin-Header Maschio
Ci sono due connettori pin header maschi da montare.
Uno da 3 pin (J5) ed uno da 4 pin (J6). Con un piccolo coltellino taglio il pin header fornito per ricavare i due necessari per questo passo.
Ora li inserisco nel PCB, assicurandomi che la parte di pin più lunga esca verso la parte superiore del PCB (quella con i componenti).

Passo #17: Pin-Header Femmina
I pin header femmina sono 3, J7 e J8 da 2 pin, mentre J3 per la connessione con lo schermo LCD e' da 20 pin.
Per saldare correttamente questi connettori, li ho posizionato sul PCB, poi li ho fissati con un piccolo pezzo di nastro isolante, che ho rimosso dopo la saldatura.
Ecco l'aspetto del PCB alla fine del passo #17.

Passo #18: Interruttori a Scorrimento
Adesso e' il turno degli interruttori "a scorrimento" CPL (SW1) , SEN1 e SEN2 (SW2, SW3)
Entrano in un solo verso sul PCB quindi non mi posso sbagliare.

Passo #19: Connettore BNC sonda
Il connettore BNC e' l'ultimo componente da montare sul PCB.
Lo monto come in figura e lo saldo al PCB. Siccome i reofori sono più spessi scaldo bene con il saldatore tenendolo qualche secondo in più del normale

Passo #20: Anello per segnale di test
Ho tagliato un piccolo spezzone di filo (circa 3 cm), ho rimosso il rivestimento e l'ho piegato come in figura.

Ora ho inserito il filo nel jumper J2 sul PCB (in alto a destra vicino al connettore a barilotto) e l'ho saldato.
Questo server abilitare il segnale di test dell'oscilloscopio.
Qui sotto il PCB con tutti i componenti ed il ponticello su J2.

Passo #21: Chiusura jumper JP3
Come ultimo passo della saldatura e' necessario cortocircuitare il ponticello JP3.
Con la punta del saldatore applico una goccia di stagno in modo da chiudere il ponticello JP3, posizionato a fianco del regolatore 79L05

Passo #22: Montaggio supporti
Concludo l'assemblaggio della scheda principale del DSO138, con l'installazione dei 4 piedini di plastica di supporto.
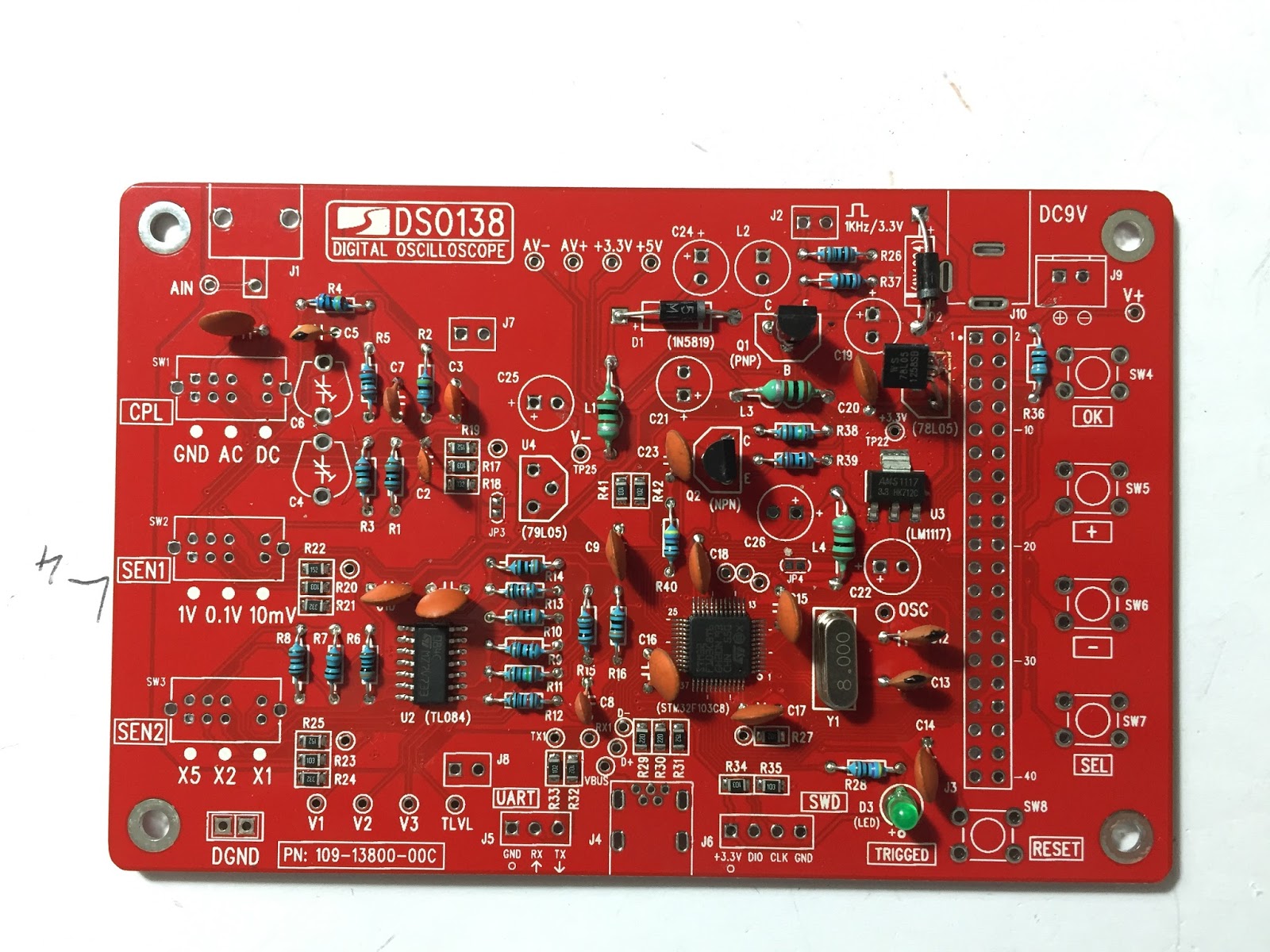
Ecco come appare il PCB principale con tutti i componenti correttamente montati

Assemblaggio schermo LCD 2.4 inch
L'oscilloscopio DSO138 e' dotato di un piccolo schermo LCD da 2.4 pollici che va assemblato e montato su connettori J10, J7 e J8 che ho saldato nei passi precedenti.
L'assemblaggio e' molto semplice, bisogna saldare due jump header machio da 2 pin nei connettori J2 e J3.
La parte leggermente più tediosa e' la saldatura del jumper J1 da 40 pin. Comunque basta un po' di pazienza e non ci saranno problemi.

Ho posizionato i pin nei connettori e li ho fermati con un po' di nastro isolante.

Ho saldato J2, J3 e i due pin sulla diagonale di J1. Ora ho rimosso il nastro isolante ed ho completato la saldatura di J1

Con questi passi ho terminato l'assemblaggio del DSO138.

Nel prossimo post, descrivo la prima accensione ed il test del DSO138