Nel primo post della serie [qui] ho descritto come assemblare i vari componenti che formano il kit del robot car.
A questo punto il robot car ha la necessita' di essere controllato per potersi muovere.
In questo post descrivo i passi necessari per installare il cervello (un raspberry pi zero) ed il driver dei 2 motori CC collegati alle ruote.
Componenti Necessari
Per portare a termine i passi descritti in questo post sono necessari i seguenti componenti
Raspberry Pi Zero

Io uso un Raspberry pi zero per le ridotte dimensioni. Altre versioni del Raspberry Pi possono essere utilizzate per questo progetto senza particolari problemi.
Suggerisco se possibile l'utilizzo di un Raspberry Pi Zero W in quanto include a bordo il wifi senza la necessita' di dongle esterni.
(Mini) BreadBoard

Per comodita' ho usato una mini breadboard con 170 punti di connessione.
E' possibile usare una piu' comune breadboard da 400 punti senza particolari problemi
IC L293(D)

Filo e Cavetti di connessione

Passiamo ora all'assemblaggio e alla realizzazione del driver per i motori collegati alle ruote.
Passo 1: Saldatura alimentazione motori

I motori sono dotati di due terminali metallici su cui bisogna saldare un filo di alimentazione.
Inseriamo un filo e ripieghiamo leggermente l'estremita' quasi a formare un piccolo uncino. Questo rende il collegamento piu' solido e duraturo.


Ora con il saldatore ben caldo applicate un po' di stagno in modo da saldare i fili di alimentazione al connettore metallico del motore.


Questo e' il risultato che si dovrebbe ottenere.

Passo 2: Fissaggio Raspberry Pi Zero al telaio
Per eseguire questo passo, oltre al Rapsberry Pi, c'e' bisogno di una vite e bulloncino (presenti nel kit RobotCar) e opzionalmente di un punto gomma adesiva.

Come si nota il Raspberry Pi e' dotato di 4 fori di ancoraggio. Noi ne useremo uno solo in questo post.

Qui indico con une freccia il foro su cui avvitare il Raspberry Pi

Dall'estremita' opposta, siccome non e' presente un foro nel telaio, applico un punto gomma adesivo per fissare meglio la scheda Raspberry Pi al telaio del RobotCar

Questo e' il risultato finale che si dovrebbe ottenere



Come si nota il Raspberry Pi e' dotato di 4 fori di ancoraggio. Noi ne useremo uno solo in questo post.

Qui indico con une freccia il foro su cui avvitare il Raspberry Pi

Dall'estremita' opposta, siccome non e' presente un foro nel telaio, applico un punto gomma adesivo per fissare meglio la scheda Raspberry Pi al telaio del RobotCar

Questo e' il risultato finale che si dovrebbe ottenere


Passo 3: Applicazione mini Breaboard sul telaio

Ho rimosso la pellicola protettiva dal fondo della mini breaboard e l'ho fissata sul telaio nello spazio disponibile tra il porta batterie e la scheda Raspberry Pi installata al passo precedente.


Ho rimosso la pellicola protettiva dal fondo della mini breaboard e l'ho fissata sul telaio nello spazio disponibile tra il porta batterie e la scheda Raspberry Pi installata al passo precedente.

Passo 4: Passaggio fili alimentazione motore
Faccio passare i fili di alimentazione dei motori nelle fessure presenti nel telaio del RobotCar come indicato in figura

Fate passare i fili con delicatezza onde evitare di staccarli dai motori.

Questo e' l'effetto finale che dovreste ottenere


Faccio passare i fili di alimentazione dei motori nelle fessure presenti nel telaio del RobotCar come indicato in figura

Fate passare i fili con delicatezza onde evitare di staccarli dai motori.

Questo e' l'effetto finale che dovreste ottenere


Passo 5: Montaggio IC L293
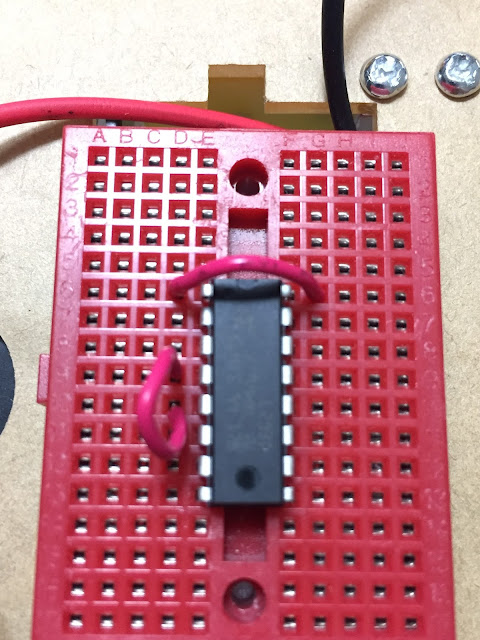
In questo passo ho inserito il circuito integrato L293D, a 16 pin, nella mini breadboard
Importantissimo notare il riferimento su un lato del chip (una mezza luna scanalata) e un cerchietto scanalato che indica il pin #1 come indicato in figura

Ho inserito con delicatezza l'integrato con il pin #1 in corrispondenza della linea 6 come indicato in figura.
Nota:
Alle volte risulta un po' difficile inserire l'integrato nella breadboard. Se capita cio' non insistere e non sforzare.
Consiglio di guardare bene i pin dell'integrato e di raddrizzarli in caso alcuno siano leggermente piegati.

Questo e' il risultato che si dovrebbe ottenere
In questo passo ho inserito il circuito integrato L293D, a 16 pin, nella mini breadboard
Importantissimo notare il riferimento su un lato del chip (una mezza luna scanalata) e un cerchietto scanalato che indica il pin #1 come indicato in figura

Ho inserito con delicatezza l'integrato con il pin #1 in corrispondenza della linea 6 come indicato in figura.
Nota:
Alle volte risulta un po' difficile inserire l'integrato nella breadboard. Se capita cio' non insistere e non sforzare.
Consiglio di guardare bene i pin dell'integrato e di raddrizzarli in caso alcuno siano leggermente piegati.

Questo e' il risultato che si dovrebbe ottenere
Passo 6: Cablaggio circuito driver per motori
Ho eseguito i cablaggi come indicato nelle figure qui sotto


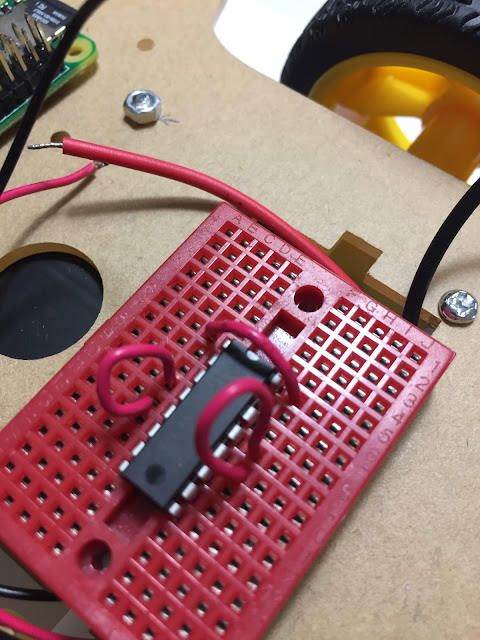
Ora inserisco i fili di alimentazione del motore di sinistra

Ora inserisco i fili di alimentazione del motore destra

Ora inserisco il filo nero che esce dal porta batterie (negativo o massa)

Ora collego il pin #2 del Raspberry Pi (+5V) al pin #1 del L293D come indicato in figura




Ora inserisco il filo rosso che esce dal porta batterie (positivo) ed aggiungo un filo dal piedino #12 del L293 a massa (basso a destra sulla mini breadboard)

Ora porto a massa il pin # 5 del L293D

Ora collego i pin #35 e #37 del Raspberry Pi (GPIO 19 e GPIO 26) alla breadboard come indicato in figura


Ora collego i pin #38 e #40 del Raspberry Pi (GPIO 20 e GPIO 21) alla breadboard come indicato in figura


Ora collego i pin #39 (GND o massa)alla breadboard come indicato in figura


Questo e' il risultato finale che dovreste ottenere


Ho eseguito i cablaggi come indicato nelle figure qui sotto




Ora inserisco i fili di alimentazione del motore di sinistra

Ora inserisco i fili di alimentazione del motore destra

Ora inserisco il filo nero che esce dal porta batterie (negativo o massa)

Ora collego il pin #2 del Raspberry Pi (+5V) al pin #1 del L293D come indicato in figura





Ora porto a massa il pin # 5 del L293D

Ora collego i pin #35 e #37 del Raspberry Pi (GPIO 19 e GPIO 26) alla breadboard come indicato in figura


Ora collego i pin #38 e #40 del Raspberry Pi (GPIO 20 e GPIO 21) alla breadboard come indicato in figura


Ora collego i pin #39 (GND o massa)alla breadboard come indicato in figura


Questo e' il risultato finale che dovreste ottenere


Conclusioni
Al termine di questo secondo post abbiamo montato sul telaio il cervello del RobotCar e cioe' il Raspberry Pi Zero
Abbiamo anche creato, utilizzando un unico integrato L293, il driver per i due motori. Questo ci permette di pilotare ogni singolo motore e farlo girare in avanti e all'indietro a differenti velocita', quindi permettendo al RobotCar di muoversi andando avanti e indietro e di ruotare a destra e sinistra.
Nei prossimi post trattero' la parte software di controllo.
Come al solito commenti costruttivi sono ben accetti
Al termine di questo secondo post abbiamo montato sul telaio il cervello del RobotCar e cioe' il Raspberry Pi Zero
Abbiamo anche creato, utilizzando un unico integrato L293, il driver per i due motori. Questo ci permette di pilotare ogni singolo motore e farlo girare in avanti e all'indietro a differenti velocita', quindi permettendo al RobotCar di muoversi andando avanti e indietro e di ruotare a destra e sinistra.
Nei prossimi post trattero' la parte software di controllo.
Come al solito commenti costruttivi sono ben accetti
Nessun commento:
Posta un commento